
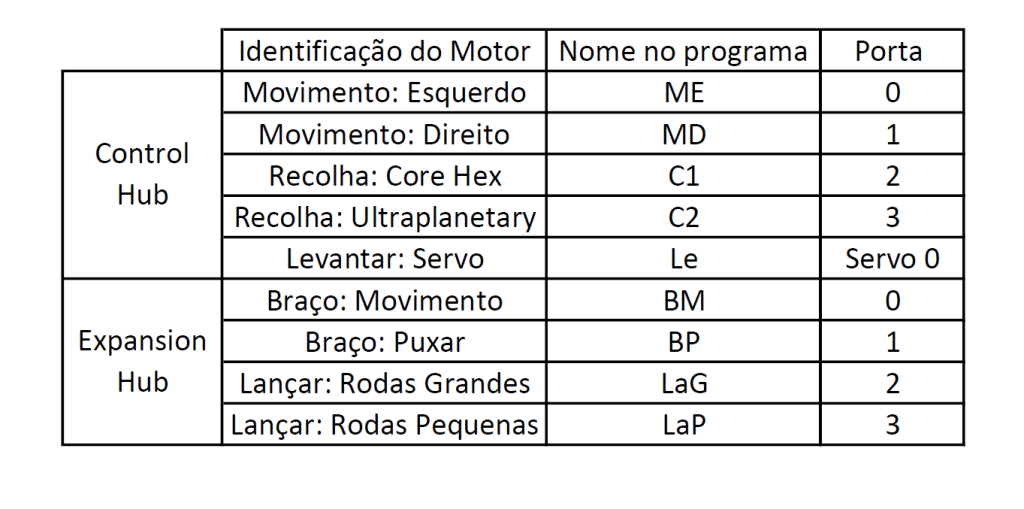
Configuração dos motores
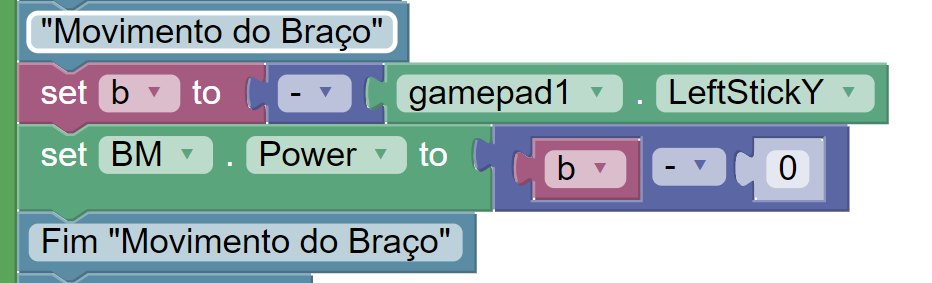
Braço
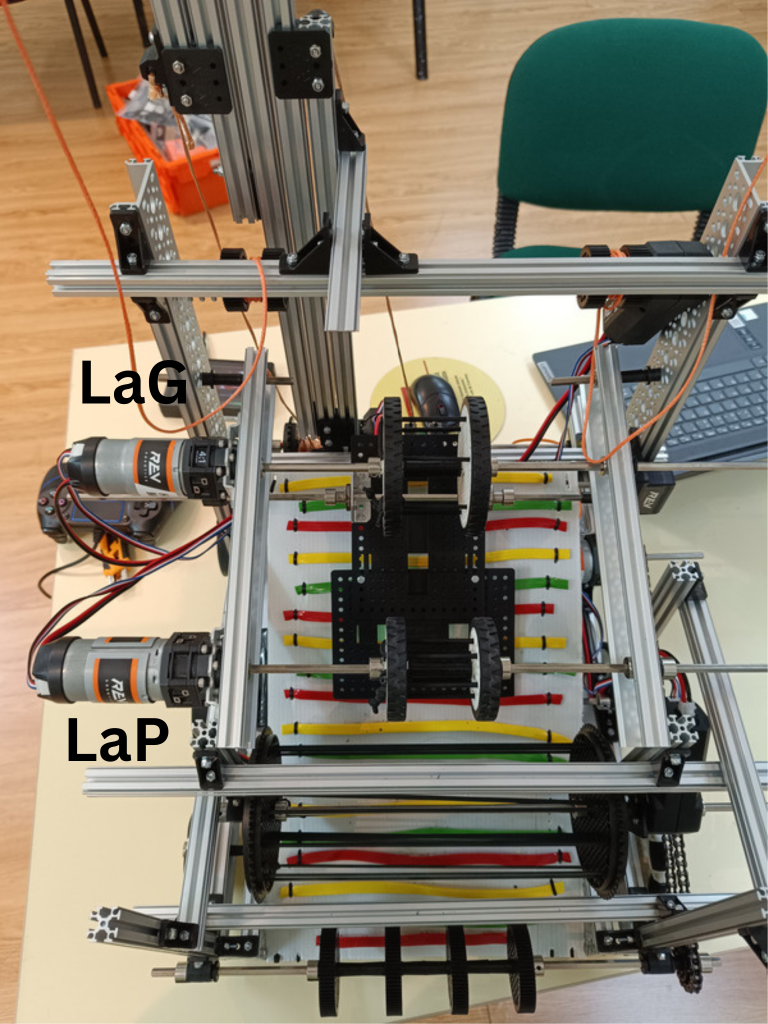
O nosso robô tem um braço modular e extensível. Através de um sistema de roldanas e corda, ao acionarmos o motor responsável, BM, a corda fica sob tensão e força o braço a estender-se.
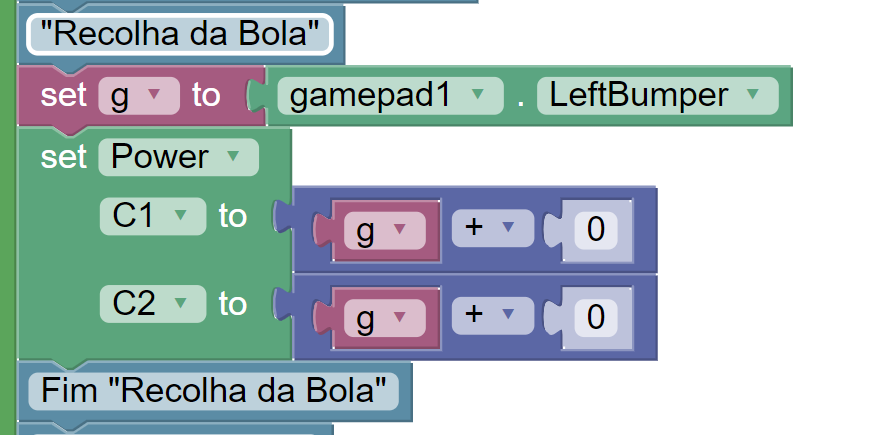
Recolher
Para o processo de recolha da bola, é necessário somente um eixo, pelo que se define apenas uma variável e se lhe adiciona zero.
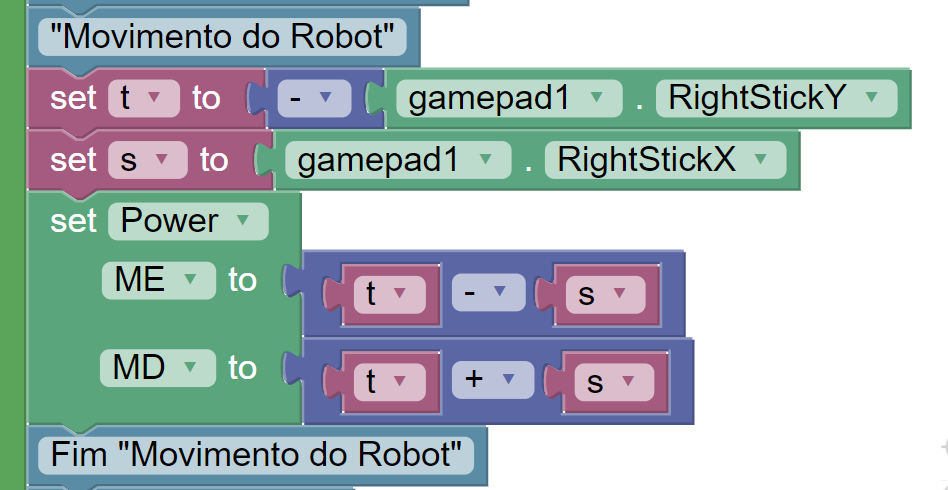
Movimento
A lógica por detrás da movimentação do robô é o sistema de eixos cartesiano, representando-se por s as abcissas e t as ordenadas.
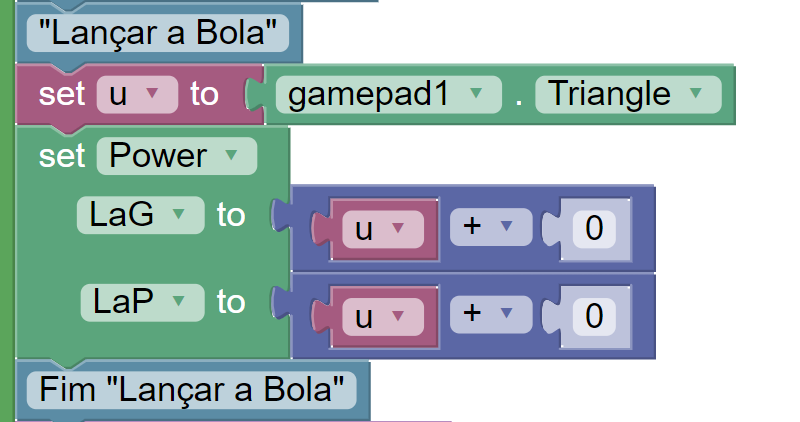
Lançar
Novamente, segue-se a lógica do sistema ortonormado. Os dois motores, LaG e LaP estão acoplados a dois eixos que atravessam um conjunto de rodas. Quando ativados, estes proporcionam um movimento às rodas que permite o lançamento da bola.
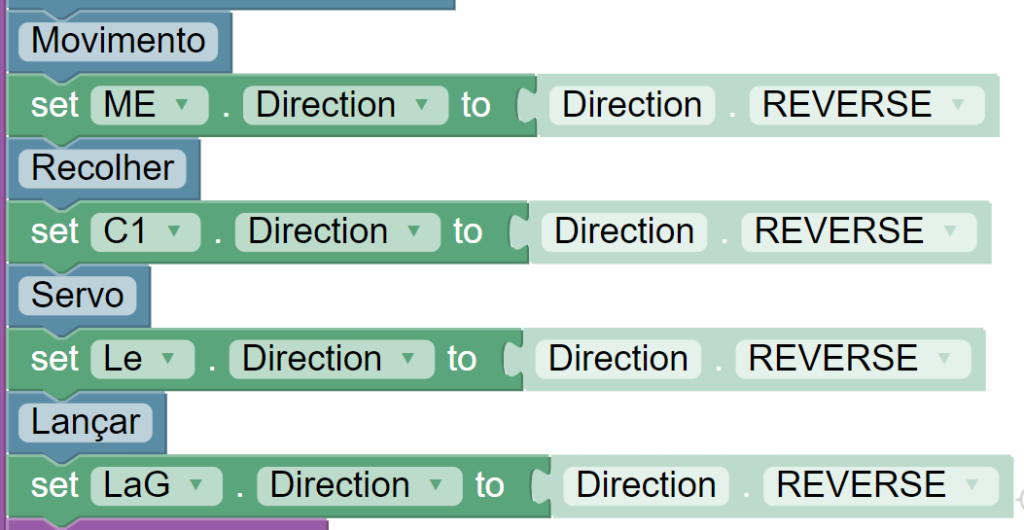
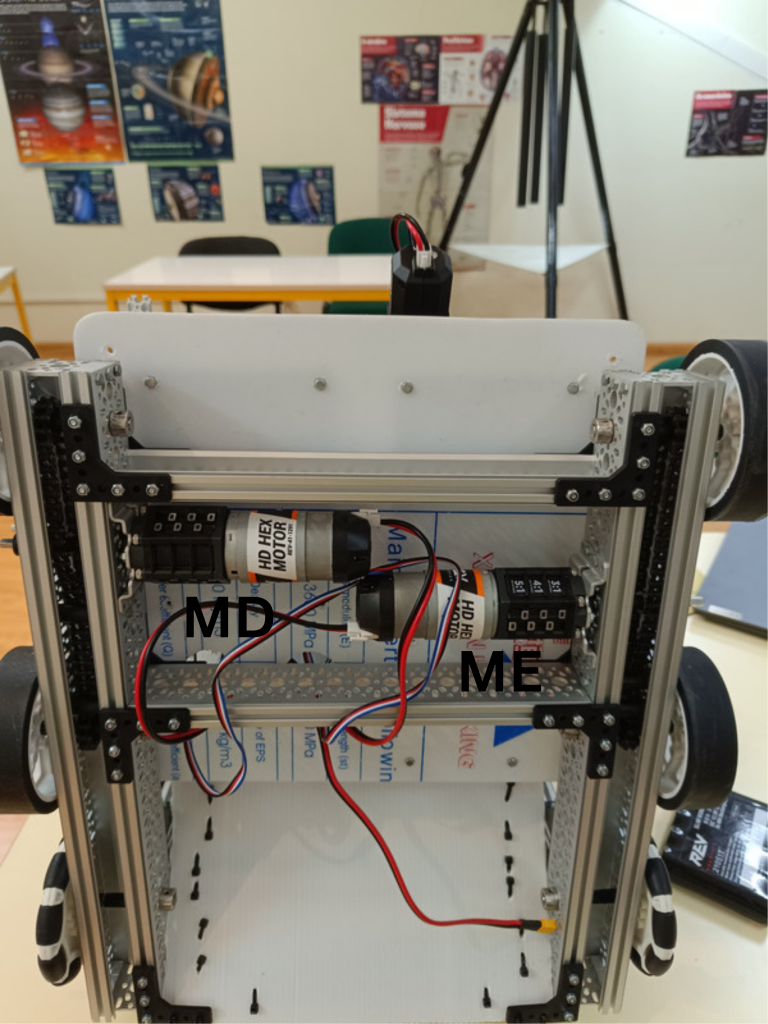
Inversão do sentido de rotação dos motores
Devido ao seu posicionamento, alguns motores requerem uma inversão no seu sentido de rotação.
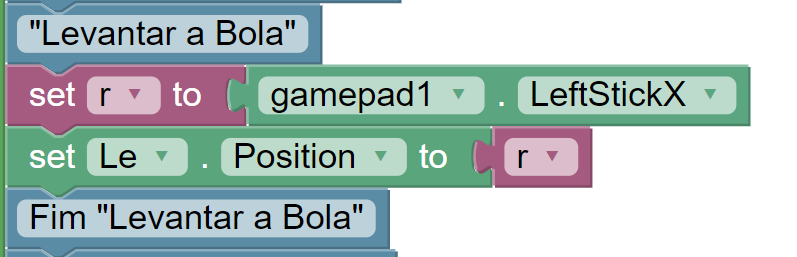
Levantar
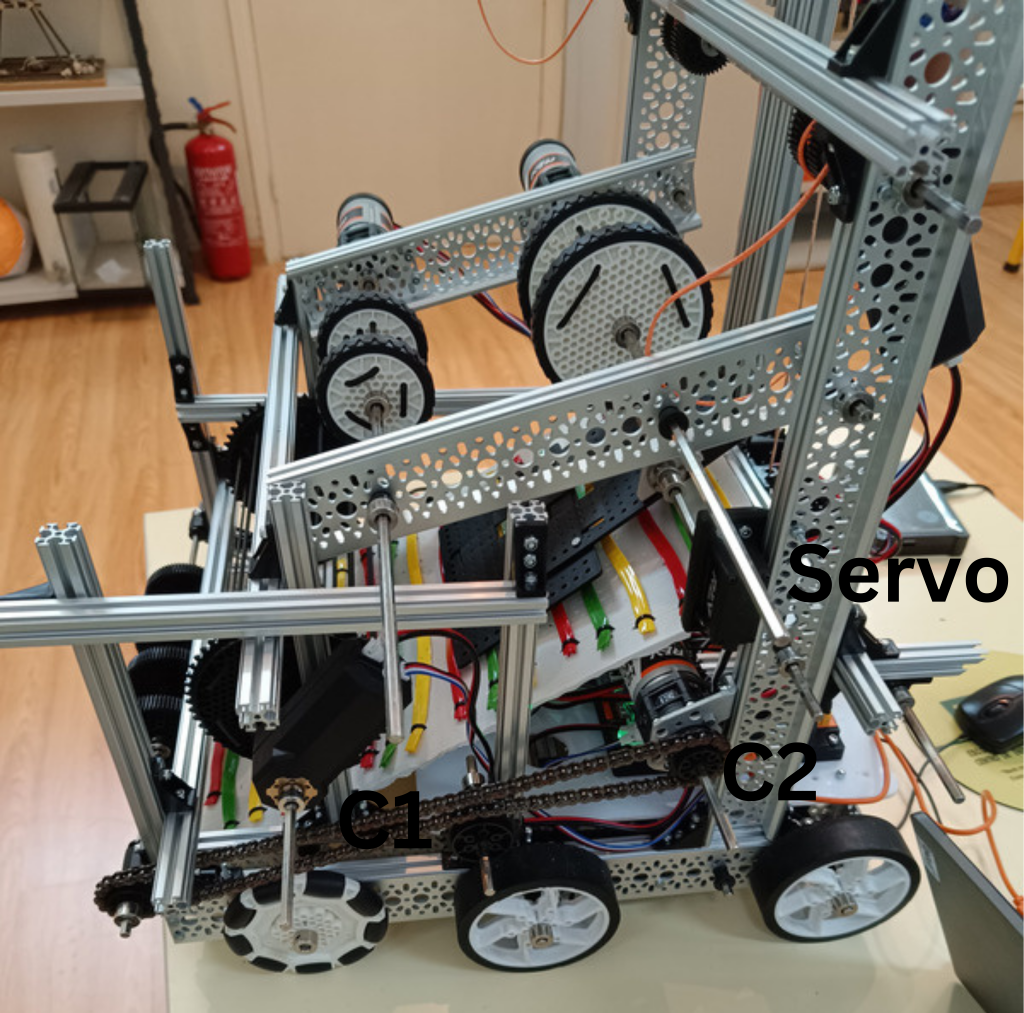
O motor servo é um caso aparte. Apesar de ser programado em conjunto com o resto do programa, tem de ser também programado localmente com um aparelho próprio, que permite a definição de uma posição 0 e 1, entre as quais o servo varia de acordo com o estipulado no programa. Este servo é o responsável por levantar a bola, permitindo o seu lançamento.
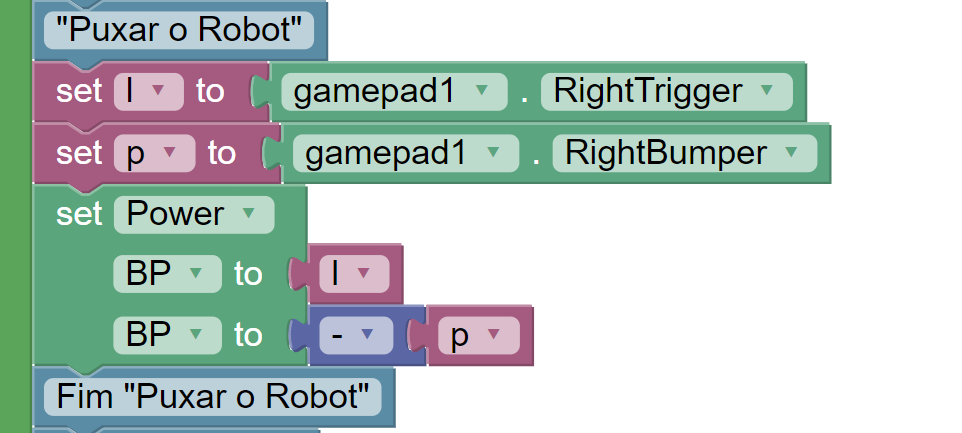
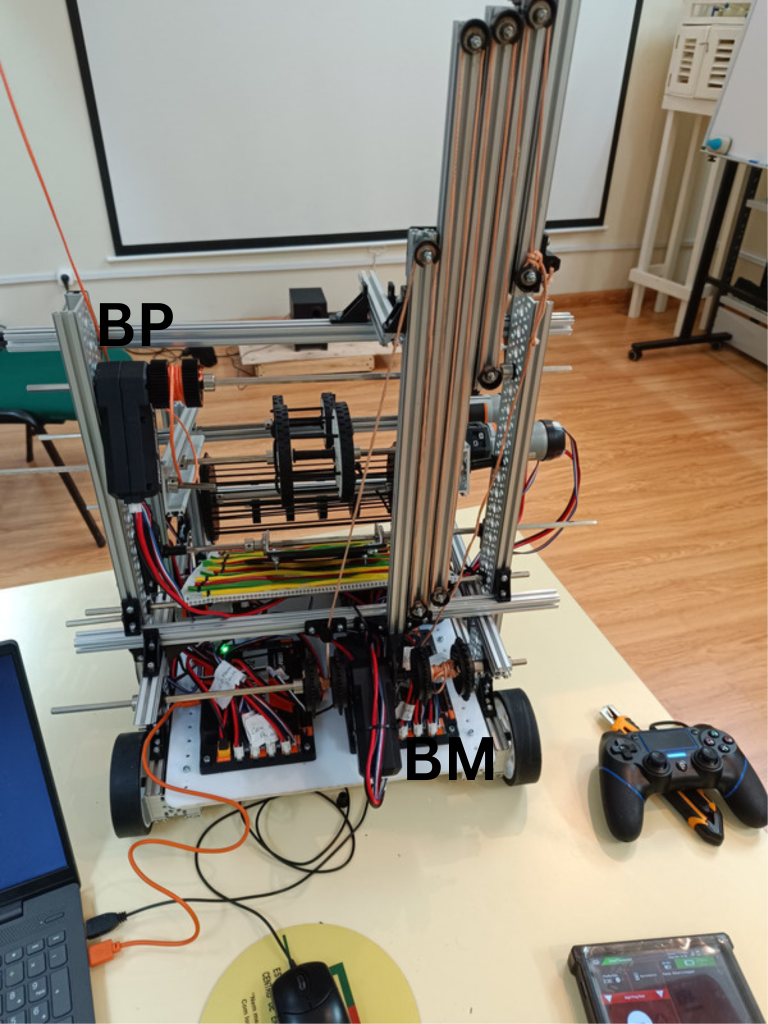
Puxar
Acoplado ao braço do robô encontra-se um gancho, cujas extremidades estão conectadas ao robô através de cordas. Quando desejado, ancora-se o gancho num suporte e, ao enrolar as bobines de fio por ação do motor BP, o robô eleva-se.
Programa na sua totalidade
O nosso robô foi programado tendo como base a linguagem Java, trabalhada através do método dos blocos. Este é o nosso programa.